
株式会社メルカリの研究開発組織「mercari R4D(アールフォーディー)」(以下、R4D)と東京大学大学院工学系研究科の川原圭博教授が総括するJST ERATO川原万有情報網プロジェクトとの共同研究「風船構造のパーソナルモビリティpoimo(ポイモ)」に関する論文が、2020年10月に開催される国際会議「UIST 2020」にて採択されたことをお知らせいたします。
今回採択された論文「poimo: Portable and Inflatable Mobility Devices Customizable for Personal Physical Characteristics」は、ユーザ・インタフェース技術などを扱う研究分野であるヒューマン・コンピュータ・インタラクション(HCI: human-computer interaction)の国際会議「UIST 2020」で発表します。主要部品を風船構造に置き換えた全く新しいパーソナルモビリティの提案と、ひとりひとりに合わせて形状をカスタマイズできる設計手法を初めて提案した点が評価されました。空気を抜いて折り畳むことができ、軽くてやわらかい風船構造を使った「poimo(ポイモ)」は、パーソナルモビリティの新分野を開拓します。
本論文は東京大学新山龍馬講師らを中心とし、当社からはリサーチャーである山村亮介(Ryosuke Yamamura)を含めた8名で共同執筆し、査読付き論文として採択されました。
発表内容のポイント
・乗るポーズをとるだけで、ひとりひとりに合わせて設計できる風船構造のパーソナルモビリティpoimo(ポイモ)を開発。空気を抜けば丸ごと折り畳むことができる電動バイク型と手動車いす型を試作しました。
・車体や車輪が風船構造で作られた乗り物を新しく開発したことで、乗り物を1台ずつカスタムメイドすることが初めて可能になりました。新規開発した設計ソフトウェアによって、誰もが簡単にパーソナルモビリティを設計できるようになりました。
・空気を抜いて折りたたむことができ、軽くてやわらかいpoimo(ポイモ)は、パーソナルモビリティの新分野を開拓します。個々人に合わせてカスタムメイドできる利点を活かし、誰もが自分に合った移動手段を獲得できるインクルーシブな社会の実現に貢献します。
研究の背景
近年、MaaS(Mobility as a Service)をはじめとしてさまざまな移動の概念が提唱され、それに呼応するように電動スクーターや電動立ち乗り二輪車など、動力を搭載した一人乗りの移動手段であるパーソナルモビリティが数多く登場しています。しかし、そのような従来のモビリティの多くは重くて大きいため、使っていない時の可搬性や収納性は良くありません。また主としてパイプや板などの剛性の高い構造が用いられるため、折り畳んでもかさばり、衝突安全性への懸念や個々人に合わせたカスタマイズの難しさなどの課題がありました。
現在、ヒューマン・コンピュータ・インタラクション(HCI)分野や、ロボティクスの分野では、インフレータブル構造(空気圧により膨らむ風船構造)を活かしたさまざまな研究が行われています。HCI分野では、やわらかさや変形を使ったユーザーインタフェースの開発、デジタルファブリケーション技術を用いたインフレータブル家具や建築構造の製作例があります。インフレータブル構造を使ったロボットはインフレータブルロボットと呼ばれ、人間と共同作業するロボットへの応用が期待されています。ここではインフレータブル構造をわかりやすく風船構造と呼びます。本研究チームでは以前から風船構造に着目し、その特性を活かしたやわらかいモータやロボットを開発してきました。HCI分野の国際会議CHI 2020では、本発表内容の前身となるパーソナルモビリティの試作品を発表しました。しかし、車輪までは風船構造に置き換えることができず、かたい車輪の重量や折りたたんだ時のサイズに課題が残っていました。また、部品数の多い複雑な形状の乗り物を風船構造で実現する方法はわかっていませんでした。
研究概要
今回開発した「poimo(ポイモ: POrtable and Inflatable MObilityの略称)」は、車体から車輪まで多くの部分を風船構造で構成した、乗り心地のよい大きさと可搬性を兼ね備えた新しいパーソナルモビリティです。軽くてやわらかい風船構造の特性を活かし、普段は小さくたたんでしまっておき、必要な時に取り出して膨らませるという、これまでにない使い方が可能です。このようなやわらかい乗りものを実現するため、本研究チームは、従来は硬質な素材で構成されていた車輪やステアリングなどを、風船構造で製作する手法を開発しました。浮き輪のような単純なビニール風船では強度が不足するため、「ドロップスティッチファブリック」と呼ばれる高い空気圧に耐える高強度の布地を使用しています。風船構造はこの布地を切り抜いて自由な形で製作できるため、カスタムメイドに適しています。ドロップスティッチファブリックで作られた車体が、軽量であるにもかかわらず人間の体重を支えられる強度を備えていることを確認しました。ドロップスティッチファブリックは布と樹脂の複合素材で、簡単にパンクすることはありません。
さらに本研究では、ユーザーが自分の身長や姿勢に合わせた大きさと形状の乗り物ものをデザインできる専用ソフトウェアを開発しました。例えば、電動バイク型のpoimoを設計する場合、まずユーザーは作りたいバイクをイメージしながら、椅子などを使ってそれに乗るポーズを取ります。ソフトウェアは、そこから姿勢の3次元情報を抽出し、ユーザーのポーズに合わせた形状・大きさの乗り物を自動的に設計して3次元モデルとして画面に表示します。提案されたデザインを元に、ユーザーはハンドルや座席の位置などをさらにカスタマイズすることができます。この時、強度や安定性、操作性が損なわれないように、設計パラメータはソフトウェアによって自動調整されます。調整の済んだ最終的なデザインは、そのまま発注可能なデータとして出力されます。
提案手法を用いて、本研究チームは、電動バイク型と手動車いす型のpoimoを実際に複数台試作しました。電動バイク型は、車輪を含めて7個のインフレータブル構造を組み合わせて作られています。小型ブラシレスモータとリチウムイオン電池で駆動され、最高速度は6km/hです。1回の充電でおよそ1時間動作します。総重量はおよそ9kgで、普通のバイクと同程度のサイズと車輪径であるにも関わらず、折りたたみ電動スクーター並の重さを達成しました。ハンドル、ベアリング、モータ、バッテリー、電子回路は風船構造にすることができませんが、小型・軽量化を行い、折りたたんだ時にかさばらないように工夫しました。手動車いす型は、車輪を含めて5個のインフレータブル構造を組み合わせて作られています。手動なのでモータやバッテリーは搭載しません。総重量はおよそ6.5kgで、普通の車いすの重量の約半分となっています。カスタマイズの一例として、前輪が長く突き出した、スポーツタイプの手動車いすも試作しました。
本研究チームはこの研究が未来社会の移動の自由度を高め、多様な人々が文化的・経済的活動に参画できるインクルーシブな社会の一助となることを期待しています。今後は更なる軽量化や操作性の向上、安全性の評価を行なっていくとともに、実用化と普及に向けた実証実験などに取り組みます。

電動バイク型のpoimo。左のポーズから右のようなバイクを自動設計する

手動車いす型のpoimo

左からバイク型、スポーツ用手動車いす型、手動車いす型

poimoに乗っている様子
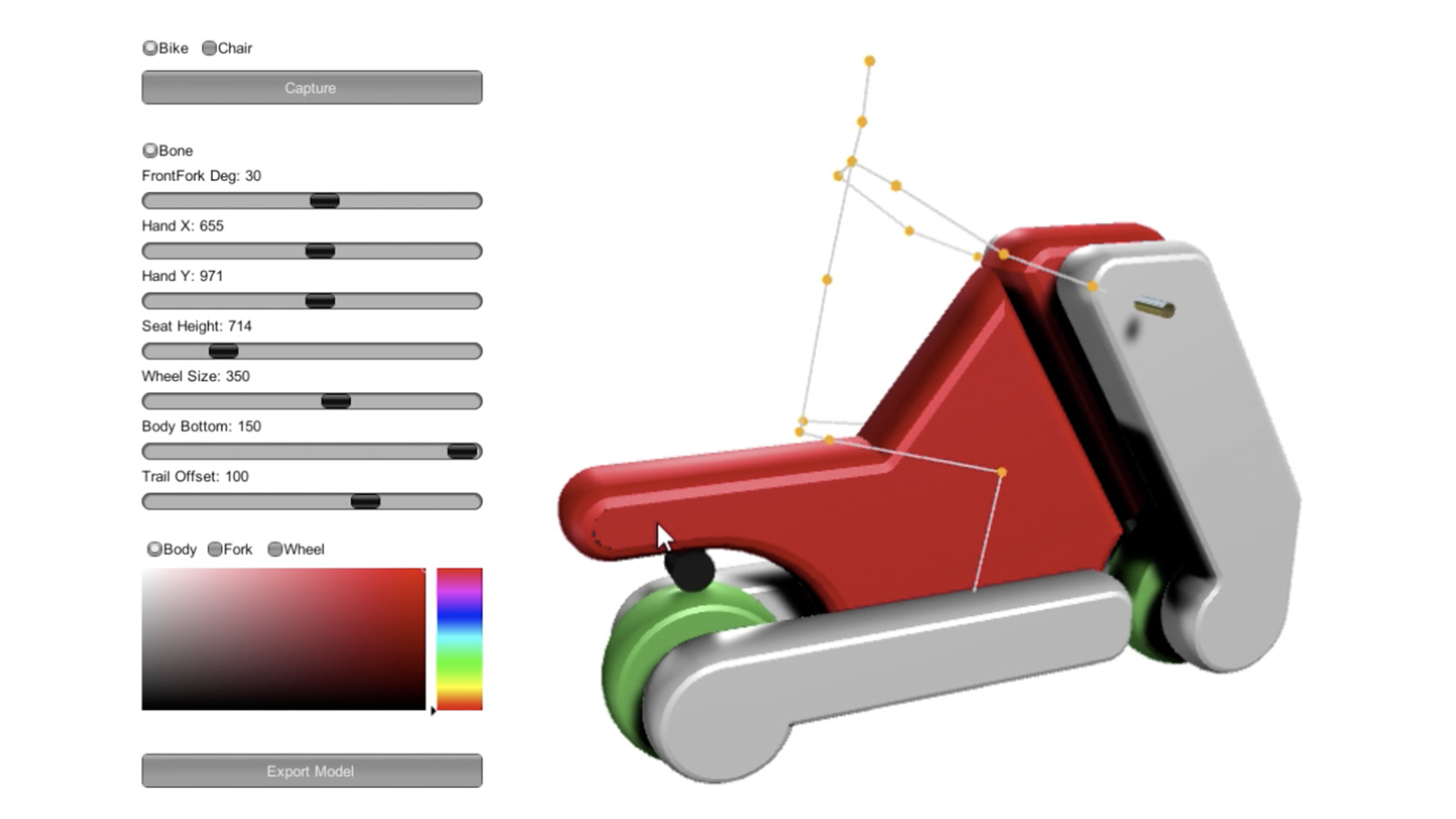
ユーザーの姿勢からpoimoをデザインするソフトウェアの画面

バイク型poimoを折りたたんだ様子と手動ポンプ。丸めてボストンバッグに収納できる
poimoプロジェクトメンバー
新山 龍馬(東京大学 大学院情報理工学系研究科 知能機械情報学専攻 講師)
佐藤 宏樹(東京大学 大学院情報理工学系研究科 知能機械情報学専攻 学術支援専門職員)
辻村 和正(東京大学 大学院学際情報学府 文化・人間情報学コース 博士課程2年生)
鳴海 紘也(東京大学 大学院情報学環 助教)
ソン ヨンア(東京大学 大学院情報理工学系研究科 知能機械情報学専攻 特任研究員)
山村 亮介(株式会社メルカリ R4D リサーチャー)
筧 康明(東京大学 大学院情報学環 准教授)
川原 圭博(東京大学 大学院工学系研究科 電気系工学専攻 教授)
論文について
国際会議名: 33rd ACM User Interface Software and Technology Symposium (UIST)
論文タイトル: “poimo: Portable and Inflatable Mobility Devices Customizable for Personal Physical Characteristics”
著者: Ryuma Niiyama* , Hiroki Sato*, Kazzmasa Tsujimura, Koya Narumi,
Young ah Seong, Ryosuke Yamamura, Yasuaki Kakehi, Yoshihiro Kawahara (* joint first authors)
DOI番号: https://dx.doi.org/10.1145/3379337.3415894
mercari R4Dについて
「mercari R4D」は2017年12月に設立した、社会実装を目的とした研究開発組織です。R4Dは、研究(Research)と4つのD、設計(Design)・開発(Development)・実装(Deployment)・破壊(Disruption)を意味します。
R4Dは「テクノロジーの力で価値交換のあり方を変えていく」をコアコンセプトに、メルカリグループのサービスや事業における将来的なイノベーション創出を目指し、AI、ブロックチェーン、HCI(ヒューマン・コンピュータ・インタラクション)、量子コンピューティング、モビリティ等を注力技術として研究開発を行っています。
ウェブサイト:https://r4d.mercari.com/